
A veces parece que la visión por computadora recibe toda la atención cuando se trata de datos de entrada para algoritmos de aprendizaje automático. Los sensores de imagen son los sensores que todos los demás sensores quieren ser. Y comprensiblemente, después de todo, la información visual es muy rica y se ha aprovechado con gran eficacia en campos que van desde la conducción autónoma y el diagnóstico médico hasta las tecnologías de asistencia. Estos éxitos pueden hacer que sea fácil olvidar la importancia de otros sentidos mientras realizamos nuestras actividades normales. Considere la posibilidad de conducir, por ejemplo; sin duda es importante ver hacia dónde se dirige, pero la sensación de la carretera a través del volante también proporciona información sobre el estado de la carretera cuando llueve o nieva. Del mismo modo, vestirse o doblar la ropa sería muy difícil si no fuera por el tacto de la tela en las manos.
Sobre este último punto, recientemente se han propuesto varios métodos para ayudar a los robots a manipular la tela de diversas formas. Sin embargo, estos enfoques no han sido particularmente efectivos en muchas tareas comunes, como agarrar una cantidad deseada de capas de tela de una pila. Para abordar estas deficiencias, un equipo de investigadores del Instituto de Robótica de la Universidad Carnegie Mellon ha desarrollado un sistema llamado ReSkin que utiliza sensores basados en magnetómetros para dar a los robots un sentido del tacto preciso, incluso cuando trabajan con materiales deformables como la tela. Este es un problema engañosamente difícil, debido a la flexibilidad de la tela y las formas impredecibles en que puede arrugarse cuando se interactúa con ella.
La tubería propuesta (📷: S. Tirumala et al.)
La piel artificial ReSkin es un polímero elástico delgado con partículas magnéticas incrustadas para permitir la captura de medidas en tres ejes. A través de movimientos o depresiones en esta piel simulada, uno puede interpretar los cambios que ocurren en los campos magnéticos circundantes como una señal táctil. Debido a que los sensores ReSkin son muy delgados y no involucran imágenes, pueden caber en áreas muy pequeñas y oscuras para recopilar información que es inaccesible por otros medios, como los pliegues entre las capas de tela.
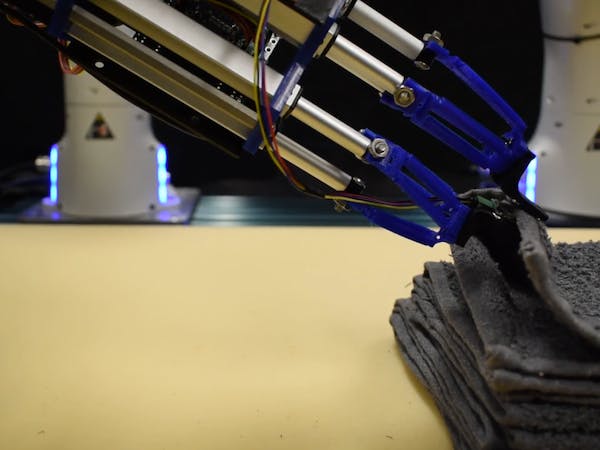
Este novedoso sensor táctil se instaló en el dedo de una pinza mini-Delta en un brazo robótico Franka de siete grados de libertad. El equipo quería enseñarle a este robot a realizar tareas como doblar la ropa, fabricar textiles o ayudar a vestirse, por lo que comenzaron con un primer paso importante: agarrar una cantidad específica de piezas de tela de una pila. La programación manual de las reglas para realizar esta tarea sería difícil y no sería capaz de adaptarse a nuevas situaciones que no se habían planificado de antemano, por lo que el equipo decidió utilizar un clasificador de aprendizaje automático para reconocer cuántas capas de tela había. el robot está agarrando.
Probando el clasificador en varios escenarios (📷: S. Tirumala et al.)
Después de recopilar un conjunto de datos de entrenamiento y enseñar un modelo de clasificación de k-medias, estaba listo para reconocer cuatro escenarios distintos: pellizcar sin tela entre los dedos o pellizcar con una, dos o tres capas de tela entre los dedos. Luego, esta información se introdujo en una tubería para alterar la política de agarre del brazo robótico para ajustar la posición de los dedos. Se observó una precisión de clasificación promedio del 84 % en una serie de pruebas, lo que demuestra que ReSkin combinado con un clasificador de aprendizaje automático es una herramienta eficaz. Sin embargo, se observó que el sistema se volvió menos efectivo a medida que aumentaba el número de capas de tela.
ReSkin ha demostrado que puede ser un mejor camino a seguir para la detección táctil, proporcionando resultados precisos donde otros métodos, especialmente la detección óptica, no son adecuados para la tarea. El alcance de este trabajo inicial fue bastante limitado, pero el equipo espera que su trabajo inspire futuras investigaciones que conduzcan a robots que puedan realizar una amplia variedad de tareas útiles a través de la detección táctil.